This post is all about a line following robot built by my friend and I, called “sataklela” (which means “crazy” in Marathi) because the silly thing would spin around chasing it’s tail if the program was bugged… which was quite often.
This robot can follow almost any black line on a white background. (We used a white flex sheet with an ellipse shaped black track printed on it)
It also stops dead in its tracks if it senses an obstacle in front of it, thereby protecting itself and the obstacle from a collision. A feature that’s especially important if the obstacle happens to be your snoozing pet!
However one of the best parts is the fire sensor: if the infrared sensor detects a fire in front of the robot, it turns on a mini fan which blows out the fire.
Here’s a peek into what went into this bot:
1] Hardware
- Powder coated metallic chassis
- Wheels (2)
- Techno board (Inventrom, Goa)
- Digital line sensor (Robosoft Systems, Mumbai)
- Proximity sensor (Robosoft Systems, Mumbai)
- Light Dependent Resistor’s (2)
- Transistors (2)
- Potentiometers (2)
- 9 volt battery
- Fan blade (small toy plastic type)
- 12 volt rechargeable lithium-ion battery
- Nuts and bolts
- Metal brackets
- Castor wheel
- USBTiny AVR programmer
2] Software
- ICC 7 for AVR
- Sinaprog (version 1)
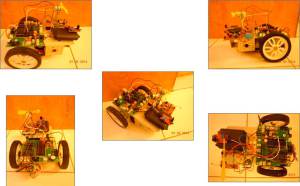
Assembly of parts was done as shown in the pictures:

Programming was done in Embedded C, using a software called ICC 7 for AVR and later burnt onto the ATMEGA32 micro-controller with Sinaprog v1.
Click on this link to get the program!
The entire project took a week to complete, from putting the first screw to testing the final product. We were so happy when on seeing it run properly, without any glitches!
Note: This robot was built for a project competition at Rayeshwar Institute of Technology in Goa where my teammate, Mithila Prabhudesai, and I won the 4th place against 19 other teams consisting of engineering students.

Sataklela was later featured in an online magazine: Young Buzz. Click here to view the article.